|
|
|
|
@ -10,8 +10,49 @@ Available as Arduino library "IRremote"
|
|
|
|
|
|
|
|
|
|
This library enables you to send and receive using infra-red signals on an Arduino.
|
|
|
|
|
|
|
|
|
|
# Table of content
|
|
|
|
|
- [API](#api)
|
|
|
|
|
- [Installation](#installation)
|
|
|
|
|
- [Supported IR Protocols](#supported-ir-protocols)
|
|
|
|
|
- [Old Wiki](#old-wiki)
|
|
|
|
|
- [Features of the 3.x version](#features-of-the-3x-version)
|
|
|
|
|
* [Converting your 2.x program to the 3.x version](#converting-your-2x-program-to-the-3x-version)
|
|
|
|
|
+ [Example](#example)
|
|
|
|
|
* [Do not want to convert your 2.x program and use the 3.x library version?](#do-not-want-to-convert-your-2x-program-and-use-the-3x-library-version)
|
|
|
|
|
* [How to convert old MSB first 32 bit IR data codes to new LSB first 32 bit IR data codes](#how-to-convert-old-msb-first-32-bit-ir-data-codes-to-new-lsb-first-32-bit-ir-data-codes)
|
|
|
|
|
- [Receiving IR codes](#receiving-ir-codes)
|
|
|
|
|
* [Minimal NEC receiver](#minimal-nec-receiver)
|
|
|
|
|
- [Sending IR codes](#sending-ir-codes)
|
|
|
|
|
+ [List of public IR code databases](#list-of-public-ir-code-databases)
|
|
|
|
|
- [FAQ and hints](#faq-and-hints)
|
|
|
|
|
- [Handling unknown Protocols](#handling-unknown-protocols)
|
|
|
|
|
* [Disclaimer](#disclaimer)
|
|
|
|
|
* [Protocol=PULSE_DISTANCE](#protocolpulse_distance)
|
|
|
|
|
* [Protocol=UNKNOWN](#protocolunknown)
|
|
|
|
|
* [How to deal with protocols not supported by IRremote](#how-to-deal-with-protocols-not-supported-by-irremote)
|
|
|
|
|
- [Examples for this library](#examples-for-this-library)
|
|
|
|
|
- [Compile options / macros for this library](#compile-options--macros-for-this-library)
|
|
|
|
|
+ [Changing include (*.h) files with Arduino IDE](#changing-include-h-files-with-arduino-ide)
|
|
|
|
|
+ [Modifying compile options with Sloeber IDE](#modifying-compile-options-with-sloeber-ide)
|
|
|
|
|
- [Supported Boards](#supported-boards)
|
|
|
|
|
- [Timer and pin usage](#timer-and-pin-usage)
|
|
|
|
|
+ [Incompatibilities to other libraries and Arduino commands like tone() and analogWrite()](#incompatibilities-to-other-libraries-and-arduino-commands-like-tone-and-analogwrite)
|
|
|
|
|
+ [Hardware-PWM signal generation for sending](#hardware-pwm-signal-generation-for-sending)
|
|
|
|
|
+ [Why do we use 33% duty cycle](#why-do-we-use-33-duty-cycle)
|
|
|
|
|
|
|
|
|
|
- [NEC encoding diagrams](#nec-encoding-diagrams)
|
|
|
|
|
- [Quick comparison of 4 Arduino IR receiving libraries](#quick-comparison-of-4-arduino-ir-receiving-libraries)
|
|
|
|
|
- [Revision History](#revision-history)
|
|
|
|
|
- [Contributing](#contributing)
|
|
|
|
|
* [Adding new protocols](#adding-new-protocols)
|
|
|
|
|
+ [Integration](#integration)
|
|
|
|
|
+ [Creating API documentation](#creating-api-documentation)
|
|
|
|
|
* [Contributors](#contributors)
|
|
|
|
|
- [License](#license)
|
|
|
|
|
* [Copyright](#copyright)
|
|
|
|
|
|
|
|
|
|
# API
|
|
|
|
|
A Doxygen documentation of the sources is available on the [project homepage](https://arduino-irremote.github.io/Arduino-IRremote/).
|
|
|
|
|
A Doxygen documentation of the sources is available on the [project homepage](https://arduino-irremote.github.io/Arduino-IRremote/classIRrecv.html).
|
|
|
|
|
|
|
|
|
|
# Installation
|
|
|
|
|
Click on the LibraryManager badge above to see the [instructions](https://www.ardu-badge.com/IRremote/zip).
|
|
|
|
|
@ -26,12 +67,12 @@ Protocols can be switched off and on by defining macros before the line `#includ
|
|
|
|
|
#include <IRremote.hpp>
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
# [Wiki](https://github.com/Arduino-IRremote/Arduino-IRremote/wiki)
|
|
|
|
|
This is a quite old but maybe useful wiki for this library.
|
|
|
|
|
# [Old Wiki](https://github.com/Arduino-IRremote/Arduino-IRremote/wiki)
|
|
|
|
|
This is a quite old but maybe useful [wiki](https://github.com/Arduino-IRremote/Arduino-IRremote/wiki) for this library.
|
|
|
|
|
|
|
|
|
|
# Features of the 3.x version
|
|
|
|
|
- You can use any pin for sending now, like you are used with receiving.
|
|
|
|
|
- Simultaneous sending and receiving. See the [UnitTest](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/UnitTest/UnitTest.ino#L165-L166) example.
|
|
|
|
|
- Simultaneous sending and receiving. See the [SendAndReceive](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/SendAndReceive/SendAndReceive.ino#L167-L170) example.
|
|
|
|
|
- No more need to use 32 bit hex values in your code. Instead a (8 bit) command value is provided for decoding (as well as an 16 bit address and a protocol number).
|
|
|
|
|
- Protocol values comply to protocol standards, i.e. NEC, Panasonic, Sony, Samsung and JVC decode and send LSB first.
|
|
|
|
|
- Supports more protocols, since adding a protocol is quite easy now.
|
|
|
|
|
@ -40,26 +81,26 @@ This is a quite old but maybe useful wiki for this library.
|
|
|
|
|
- Supports more platforms, since the new structure allows to easily add a new platform.
|
|
|
|
|
- Feedback LED also for sending.
|
|
|
|
|
- Ability to generate a non PWM signal to just simulate an active low receiver signal for direct connect to existent receiving devices without using IR.
|
|
|
|
|
- Easy configuration of protocols required, directly in your [source code[(https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/SimpleReceiver/SimpleReceiver.ino#L18-L34). This reduces the memory footprint and increases decoding time.
|
|
|
|
|
- Easy configuration of protocols required, directly in your [source code](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/SimpleReceiver/SimpleReceiver.ino#L33-L57). This reduces the memory footprint and increases decoding time.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# Converting your 2.x program to the 3.x version
|
|
|
|
|
## Converting your 2.x program to the 3.x version
|
|
|
|
|
Starting with the 3.1 version, **the generation of PWM for sending is done by software**, thus saving the hardware timer and **enabling arbitrary output pins for sending**.<br/>
|
|
|
|
|
If you use an (old) Arduino core that does not use the `-flto` flag for compile, you can activate the line `#define SUPPRESS_ERROR_MESSAGE_FOR_BEGIN` in IRRemote.h, if you get false error messages regarding begin() during compilation.
|
|
|
|
|
|
|
|
|
|
- Now there is an **IRreceiver** and **IRsender** object like the well known Arduino **Serial** object.
|
|
|
|
|
- Just remove the line `IRrecv IrReceiver(IR_RECEIVE_PIN);` and/or `IRsend IrSender;` in your program, and replace all occurrences of `IRrecv.` or `irrecv.` with `IrReceiver` and replace all `IRsend` or `irsend` with `IrSender`.
|
|
|
|
|
- Since the decoded values are now in `IrReceiver.decodedIRData` and not in `results` any more, remove the line `decode_results results` or similar.
|
|
|
|
|
- Like for the Serial object, call [`IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/ReceiveDemo/ReceiveDemo.ino#L38)
|
|
|
|
|
- Like for the Serial object, call [`IrReceiver.begin(IR_RECEIVE_PIN, ENABLE_LED_FEEDBACK);`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/examples/ReceiveDemo/ReceiveDemo.ino#L106)
|
|
|
|
|
or `IrReceiver.begin(IR_RECEIVE_PIN, DISABLE_LED_FEEDBACK);` instead of the `IrReceiver.enableIRIn();` or `irrecv.enableIRIn();` in setup(). For sending, call `IrSender.begin(IR_SEND_PIN, ENABLE_LED_FEEDBACK);` or `IrSender.begin(IR_SEND_PIN, DISABLE_LED_FEEDBACK);` in setup().
|
|
|
|
|
- Old `decode(decode_results *aResults)` function is replaced by simple `decode()`. So if you have a statement `if(irrecv.decode(&results))` replace it with `if (IrReceiver.decode())`.
|
|
|
|
|
- The decoded result is now in in `IrReceiver.decodedIRData` and not in `results` any more, therefore replace any occurrences of `results.value` and `results.decode_type` (and similar) to
|
|
|
|
|
`IrReceiver.decodedIRData.decodedRawData` and `IrReceiver.decodedIRData.protocol`.
|
|
|
|
|
- Overflow, Repeat and other flags are now in [`IrReceiver.receivedIRData.flags`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremote.h#L126).
|
|
|
|
|
- Overflow, Repeat and other flags are now in [`IrReceiver.receivedIRData.flags`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremoteInt.h#L164-L187).
|
|
|
|
|
- Seldom used: `results.rawbuf` and `results.rawlen` must be replaced by `IrReceiver.decodedIRData.rawDataPtr->rawbuf` and `IrReceiver.decodedIRData.rawDataPtr->rawlen`.
|
|
|
|
|
|
|
|
|
|
## Example
|
|
|
|
|
### 2.x program:
|
|
|
|
|
### Example
|
|
|
|
|
#### 2.x program:
|
|
|
|
|
|
|
|
|
|
```c++
|
|
|
|
|
#include <IRremote.h>
|
|
|
|
|
@ -83,7 +124,7 @@ void loop() {
|
|
|
|
|
}
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
### 3.x program:
|
|
|
|
|
#### 3.x program:
|
|
|
|
|
|
|
|
|
|
```c++
|
|
|
|
|
#include <IRremote.hpp>
|
|
|
|
|
@ -105,7 +146,7 @@ void loop() {
|
|
|
|
|
}
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
# Do not want to convert your 2.x program and use the 3.x library version?
|
|
|
|
|
## Do not want to convert your 2.x program and use the 3.x library version?
|
|
|
|
|
First consider to just use the [original 2.4 release form 2017](https://github.com/Arduino-IRremote/Arduino-IRremote/releases/tag/v2.4.0)
|
|
|
|
|
or the last backwards compatible [2.8 version](https://github.com/Arduino-IRremote/Arduino-IRremote/releases/tag/2.8.0) for you project.
|
|
|
|
|
It may be sufficient and deals flawlessly with 32 bit IR codes.<br/>
|
|
|
|
|
@ -118,7 +159,7 @@ to make it clearer that they send data with MSB first, which is not the standard
|
|
|
|
|
Use them to send your **old MSB-first 32 bit IR data codes**.
|
|
|
|
|
In the new version you will send NEC (and other) commands not by 32 bit codes but by a (constant) 8 bit address and an 8 bit command.
|
|
|
|
|
|
|
|
|
|
# How to convert old MSB first 32 bit IR data codes to new LSB first 32 bit IR data codes
|
|
|
|
|
## How to convert old MSB first 32 bit IR data codes to new LSB first 32 bit IR data codes
|
|
|
|
|
For the new decoders for **NEC, Panasonic, Sony, Samsung and JVC**, the result `IrReceiver.decodedIRData.decodedRawData` is now **LSB-first**, as the definition of these protocols suggests!<br/>
|
|
|
|
|
To convert one into the other, you must reverse the byte/nibble positions and then reverse all bit positions of each byte/nibble or write it as one binary string and reverse/mirror it.<br/><br/>
|
|
|
|
|
Example:
|
|
|
|
|
@ -146,10 +187,13 @@ struct IRData {
|
|
|
|
|
};
|
|
|
|
|
```
|
|
|
|
|
To access e.g. the **RAW data**, use `uint32_t myRawdata= IrReceiver.decodedIRData.decodedRawData;`.<br/>
|
|
|
|
|
The content of the `IrReceiver.decodedIRData.flags` is described [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremoteInt.h#L204-L212).<br/>
|
|
|
|
|
The content of the `IrReceiver.decodedIRData.flags` is described [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/IRremoteInt.h#L164-L175).<br/>
|
|
|
|
|
To **print all fields**, use `IrReceiver.printIRResultShort(&Serial);`.<br/>
|
|
|
|
|
To print the **raw timing data** received, use `IrReceiver.printIRResultRawFormatted(&Serial, true);`.
|
|
|
|
|
|
|
|
|
|
## Minimal NEC receiver
|
|
|
|
|
For applications only requiring NEC protocol, there is a receiver which has very **small code size of 500 bytes and does NOT require any timer**. See the MinimalReceiver and IRDispatcherDemo example how to use it.
|
|
|
|
|
|
|
|
|
|
# Sending IR codes
|
|
|
|
|
Please do not use the old send*Raw() functions for sending like e.g. `IrSender.sendNECRaw(0xE61957A8,2)`,
|
|
|
|
|
even if this functions are used in a lot of **(old)** tutorials. They are only kept for backward compatibility and unsupported and error prone.<br/>
|
|
|
|
|
@ -160,7 +204,7 @@ You will discover that **the address is a constant** and the commands sometimes
|
|
|
|
|
### List of public IR code databases
|
|
|
|
|
http://www.harctoolbox.org/IR-resources.html
|
|
|
|
|
|
|
|
|
|
# FAQ
|
|
|
|
|
# FAQ and hints
|
|
|
|
|
- IR does not work right when I use **Neopixels** (aka WS2811/WS2812/WS2812B) or other libraries blocking interrupts for a longer time (> 50 µs).<br/>
|
|
|
|
|
Whether you use the Adafruit Neopixel lib, or FastLED, interrupts get disabled on many lower end CPUs like the basic Arduinos for longer than 50 µs.
|
|
|
|
|
In turn, this stops the IR interrupt handler from running when it needs to.<br/>
|
|
|
|
|
@ -172,9 +216,11 @@ There are some other solutions to this on more powerful processors,
|
|
|
|
|
The IR receivers use an NPN transistor as output device with just a 30k resistor to VCC.
|
|
|
|
|
This is almost "open collector" and allows connecting of several output pins to one Arduino input pin.
|
|
|
|
|
- The **minimal CPU frequency** for receiving is 4 MHz, since the 50 µs timer ISR takes around 12 µs on a 16 MHz ATmega.
|
|
|
|
|
|
|
|
|
|
# Minimal version
|
|
|
|
|
For applications only requiring NEC protocol, there is a receiver which has very **small code size of 500 bytes and does NOT require any timer**. See the MinimalReceiver and IRDispatcherDemo example how to use it. Mapping of pins to interrupts can be found [here](https://github.com/Arduino-IRremote/Arduino-IRremote/tree/master/src/TinyIRReceiver.hpp#L307).
|
|
|
|
|
- To **increase strength of sent output signal** you can increase the current through the send diode, and/or use 2 diodes in series,
|
|
|
|
|
since one IR diode requires only 1.5 volt.
|
|
|
|
|
- The line \#include "ATtinySerialOut.h" in PinDefinitionsAndMore.h (requires the library to be installed) saves 370 bytes program space and 38 bytes RAM for **Digispark boards** as well as enables serial output at 8MHz.
|
|
|
|
|
- The default software generated PWM has **problems on AVR running with 8 MHz**. The PWM frequency is around 30 instead of 38 kHz and RC6 is not reliable. You can switch to timer PWM generation by `#define SEND_PWM_BY_TIMER`.
|
|
|
|
|
- If you require **IRremote.hpp in multiple files** / want to **avoid "multiple definition" error**, use `#include <IRremote.hpp>` only in one file, e.g. the .ino file (the file containing main()) and use `#include <IRremoteInt.h>` **in all other files**. Be careful to define these 3 macros `RAW_BUFFER_LENGTH` and `IR_SEND_PIN` and `SEND_PWM_BY_TIMER` in IRremoteInt.h consistent with the definitions in the .ino file!
|
|
|
|
|
|
|
|
|
|
# Handling unknown Protocols
|
|
|
|
|
## Disclaimer
|
|
|
|
|
@ -184,7 +230,7 @@ The main reason is, that it was designed to fit inside MCUs with relatively low
|
|
|
|
|
|
|
|
|
|
## Protocol=PULSE_DISTANCE
|
|
|
|
|
If you get something like this: `PULSE_DISTANCE: HeaderMarkMicros=8900 HeaderSpaceMicros=4450 MarkMicros=550 OneSpaceMicros=1700 ZeroSpaceMicros=600 NumberOfBits=56 0x43D8613C 0x3BC3BC`, then you have a code consisting of **56 bits**, which is probably from an air condioner remote. You can send it with calling sendPulseDistanceWidthData() twice, once for the first 32 bit and next for the remaining 24 bits.<br/>
|
|
|
|
|
**The PulseDistance or PulseWidth decoders just decode a timing steam to a bit stream**. They can not put any semantics like address, command or checksum on this bitstream, since it is no known protocol. But the bitstram is way more readable, than a timing stream. This bitstram is read **LSB first by default**. If this does not suit you for further research, you can change it [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_DistanceProtocol.cpp#L48).
|
|
|
|
|
**The PulseDistance or PulseWidth decoders just decode a timing steam to a bit stream**. They can not put any semantics like address, command or checksum on this bitstream, since it is no known protocol. But the bitstram is way more readable, than a timing stream. This bitstram is read **LSB first by default**. If this does not suit you for further research, you can change it [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_DistanceProtocol.hpp#L48).
|
|
|
|
|
|
|
|
|
|
## Protocol=UNKNOWN
|
|
|
|
|
If you see something like `Protocol=UNKNOWN Hash=0x13BD886C 35 bits received` as output of e.g. the ReceiveDemo example, you either have a problem with decoding a protocol, or an unsupported protocol.
|
|
|
|
|
@ -208,16 +254,7 @@ If you do not know which protocol your IR transmitter uses, you have several cho
|
|
|
|
|
It can automatically generate a send sketch for your protocol by exporting as "Arduino Raw". It supports IRremote,
|
|
|
|
|
the old [IRLib](https://github.com/cyborg5/IRLib) and [Infrared4Arduino](https://github.com/bengtmartensson/Infrared4Arduino).
|
|
|
|
|
|
|
|
|
|
# Hints
|
|
|
|
|
- To **increase strength of sent output signal** you can increase the current through the send diode, and/or use 2 diodes in series,
|
|
|
|
|
since one IR diode requires only 1.5 volt.
|
|
|
|
|
- The line \#include "ATtinySerialOut.h" in PinDefinitionsAndMore.h (requires the library to be installed) saves 370 bytes program space and 38 bytes RAM for **Digispark boards** as well as enables serial output at 8MHz.
|
|
|
|
|
- The default software generated PWM has **problems on AVR running with 8 MHz**. The PWM frequency is around 30 instead of 38 kHz and RC6 is not reliable. You can switch to timer PWM generation by `#define SEND_PWM_BY_TIMER`.
|
|
|
|
|
|
|
|
|
|
# Requiring IRremote.h in multiple files / avoiding "multiple definition" error
|
|
|
|
|
Use `#include <IRremote.hpp>` only in one file, e.g. the .ino file (the file containing main()) and use `#include <IRremoteInt.h>` **in all other files**. Be careful to define these 3 macros `RAW_BUFFER_LENGTH` and `IR_SEND_PIN` and `SEND_PWM_BY_TIMER` in IRremoteInt.h consistent with the definitions in the .ino file!
|
|
|
|
|
|
|
|
|
|
# Examples
|
|
|
|
|
# Examples for this library
|
|
|
|
|
In order to fit the examples to the 8K flash of ATtiny85 and ATtiny88, the [Arduino library ATtinySerialOut](https://github.com/ArminJo/ATtinySerialOut) is required for this CPU's.
|
|
|
|
|
|
|
|
|
|
### SimpleReceiver + SimpleSender
|
|
|
|
|
@ -284,7 +321,6 @@ Or define the macro with the -D compiler option for global compile (the latter i
|
|
|
|
|
| `SEND_PWM_BY_TIMER` | Before `#include <IRremote.hpp>` | disabled | Disable carrier PWM generation in software and use (restricted) hardware PWM except for ESP32 where both modes are using the flexible `hw_timer_t`. |
|
|
|
|
|
| `USE_NO_SEND_PWM` | Before `#include <IRremote.hpp>` | disabled | Use no carrier PWM, just simulate an **active low** receiver signal. Overrides `SEND_PWM_BY_TIMER` definition. |
|
|
|
|
|
| `USE_OPEN_DRAIN_OUTPUT_FOR_SEND_PIN` | Before `#include <IRremote.hpp>` | disabled | Use or simulate open drain output mode at send pin. **Attention, active state of open drain is LOW**, so connect the send LED between positive supply and send pin! |
|
|
|
|
|
| `NO_LEGACY_COMPATIBILITY` | IRremoteInt.h | disabled | Disables the old decoder for version 2.x compatibility, where all protocols -especially NEC, Panasonic, Sony, Samsung and JVC- were MSB first. Saves around 60 bytes program space and 14 bytes RAM. |
|
|
|
|
|
| `EXCLUDE_EXOTIC_PROTOCOLS` | Before `#include <IRremote.hpp>` | disabled | If activated, BOSEWAVE, WHYNTER and LEGO_PF are excluded in `decode()` and in sending with `IrSender.write()`. Saves up to 650 bytes program space. |
|
|
|
|
|
| `EXCLUDE_UNIVERSAL_PROTOCOLS` | Before `#include <IRremote.hpp>` | disabled | If activated, the universal decoder for pulse width or pulse distance protocols and decodeHash (special decoder for all protocols) are excluded in `decode()`. Saves up to 1000 bytes program space. |
|
|
|
|
|
| `MARK_EXCESS_MICROS` | Before `#include <IRremote.hpp>` | 20 | MARK_EXCESS_MICROS is subtracted from all marks and added to all spaces before decoding, to compensate for the signal forming of different IR receiver modules. |
|
|
|
|
|
@ -299,17 +335,17 @@ Or define the macro with the -D compiler option for global compile (the latter i
|
|
|
|
|
|-|-|-|-|
|
|
|
|
|
| `IR_INPUT_PIN` | TinyIRReceiver.h | 2 | The pin number for TinyIRReceiver IR input, which gets compiled in. |
|
|
|
|
|
| `IR_FEEDBACK_LED_PIN` | TinyIRReceiver.h | `LED_BUILTIN` | The pin number for TinyIRReceiver feedback LED, which gets compiled in. |
|
|
|
|
|
| `DO_NOT_USE_FEEDBACK_LED` | TinyIRReceiver.h | disabled | Enable it to disable the feedback LED function. |
|
|
|
|
|
| `NO_LED_FEEDBACK_CODE` | TinyIRReceiver.h | disabled | Enable it to disable the feedback LED function. Saves 14 bytes program space. |
|
|
|
|
|
|
|
|
|
|
### Modifying compile options with Arduino IDE
|
|
|
|
|
### Changing include (*.h) files with Arduino IDE
|
|
|
|
|
First, use *Sketch > Show Sketch Folder (Ctrl+K)*.<br/>
|
|
|
|
|
If you did not yet stored the example as your own sketch, then you are instantly in the right library folder.<br/>
|
|
|
|
|
If you have not yet saved the example as your own sketch, then you are instantly in the right library folder.<br/>
|
|
|
|
|
Otherwise you have to navigate to the parallel `libraries` folder and select the library you want to access.<br/>
|
|
|
|
|
In both cases the library files itself are located in the `src` directory.<br/>
|
|
|
|
|
The modification must be renewed for each new IRremote library version!
|
|
|
|
|
In both cases the library source and include files are located in the libraries `src` directory.<br/>
|
|
|
|
|
The modification must be renewed for each new library version!
|
|
|
|
|
|
|
|
|
|
### Modifying compile options with Sloeber IDE
|
|
|
|
|
If you are using Sloeber as your IDE, you can easily define global symbols with *Properties > Arduino > CompileOptions*.<br/>
|
|
|
|
|
If you are using [Sloeber](https://eclipse.baeyens.it) as your IDE, you can easily define global symbols with *Properties > Arduino > CompileOptions*.<br/>
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
# Supported Boards
|
|
|
|
|
@ -406,44 +442,7 @@ The timer and the pin usage can be adjusted in [private/IRTimer.hpp](https://git
|
|
|
|
|
| [BluePill / STM32F103C8T6](https://github.com/rogerclarkmelbourne/Arduino_STM32) | **3** | % | **PA6 & PA7 & PB0 & PB1** |
|
|
|
|
|
| [BluePill / STM32F103C8T6](https://stm32-base.org/boards/STM32F103C8T6-Blue-Pill) | **TIM4** | % | **PB6 & PB7 & PB8 & PB9** |
|
|
|
|
|
|
|
|
|
|
# Adding new protocols
|
|
|
|
|
To add a new protocol is quite straightforward. Best is too look at the existing protocols to find a similar one and modify it.<br/>
|
|
|
|
|
As a rule of thumb, it is easier to work with a description of the protocol rather than trying to entirely reverse-engineer the protocol.
|
|
|
|
|
Please include a link to the description in the header, if you found one.<br/>
|
|
|
|
|
The **durations** you receive are likely to be longer for marks and shorter for spaces than the protocol suggests,
|
|
|
|
|
but this depends on the receiver circuit in use. Most protocols use multiples of one time-unit for marks and spaces like e.g. [NEC](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_NEC.cpp#L50). It's easy to be off-by-one with the last bit, since the last space is not recorded by IRremote.
|
|
|
|
|
|
|
|
|
|
Try to make use of the template functions `decodePulseDistanceData()` and `sendPulseDistanceData()`.
|
|
|
|
|
If your protocol supports address and code fields, try to reflect this in your api like it is done in [`sendNEC(uint16_t aAddress, uint8_t aCommand, uint_fast8_t aNumberOfRepeats, bool aIsRepeat)`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_NEC.cpp#L86) and [`decodeNEC()`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_NEC.cpp#L145).<br/>
|
|
|
|
|
|
|
|
|
|
### Integration
|
|
|
|
|
To integrate your protocol, you need to extend the two functions `decode()` and `getProtocolString()` in *IRreceice.cpp*,
|
|
|
|
|
add macros and function declarations for sending and receiving and extend the `enum decode_type_t` in *IRremote.h*.<br/>
|
|
|
|
|
And at least it would be wonderful if you can provide an example how to use the new protocol.
|
|
|
|
|
A detailed description can be found in the [ir_Template.cpp](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_Template.cpp#L18) file.
|
|
|
|
|
|
|
|
|
|
# NEC encoding
|
|
|
|
|
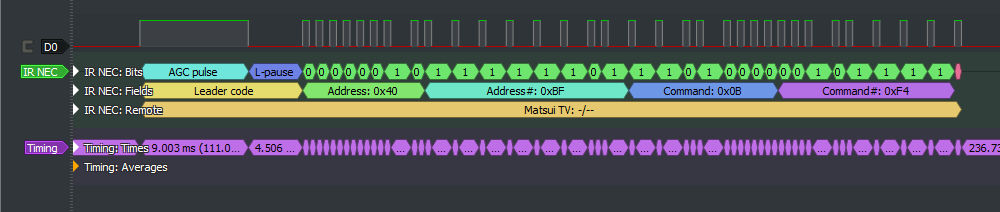
Created with sigrok PulseView with IR_NEC decoder by DjordjeMandic.<br/>
|
|
|
|
|
8 bit address NEC code
|
|
|
|
|
|
|
|
|
|
16 bit address NEC code
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# Revision History
|
|
|
|
|
Please see [changelog.md](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/changelog.md).
|
|
|
|
|
|
|
|
|
|
# API documentation
|
|
|
|
|
See [API reference in wiki](https://github.com/Arduino-IRremote/Arduino-IRremote/wiki/API-Reference).
|
|
|
|
|
|
|
|
|
|
To generate the API documentation,
|
|
|
|
|
Doxygen, as well as [Graphviz](http://www.graphviz.org/) should be installed.
|
|
|
|
|
(Note that on Windows, it is useful to specify the installer to add Graphviz to PATH or to do it manually.
|
|
|
|
|
With Doxygen and Graphviz installed, issue the command
|
|
|
|
|
`doxygen` from the command line in the main project directory, which will
|
|
|
|
|
generate the API documentation in HTML format.
|
|
|
|
|
The just generated `docs/index.html` can now be opened in a browser.
|
|
|
|
|
|
|
|
|
|
## Why do we use 33% duty cycle
|
|
|
|
|
### Why do we use 33% duty cycle
|
|
|
|
|
We do it according to the statement in the [Vishay datasheet](https://www.vishay.com/docs/80069/circuit.pdf):
|
|
|
|
|
- Carrier duty cycle 50 %, peak current of emitter IF = 200 mA, the resulting transmission distance is 25 m.
|
|
|
|
|
- Carrier duty cycle 10 %, peak current of emitter IF = 800 mA, the resulting transmission distance is 29 m. - Factor 1.16
|
|
|
|
|
@ -454,10 +453,18 @@ BTW, **the best way to increase the IR power** is to use 2 or 3 IR diodes in ser
|
|
|
|
|
To keep the current, you must reduce the resistor by (5 - 1.3) / (5 - 2.6) = 1.5 e.g. from 150 ohm to 100 ohm for 25 mA and 2 diodes with 1.3 volt and a 5 volt supply.<br/>
|
|
|
|
|
For 3 diodes it requires factor 2.5 e.g. from 150 ohm to 60 ohm.
|
|
|
|
|
|
|
|
|
|
# NEC encoding diagrams
|
|
|
|
|
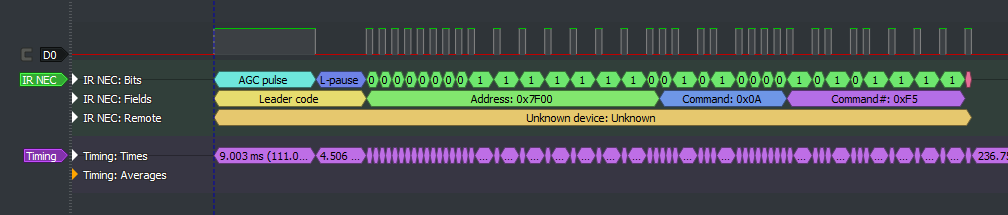
Created with sigrok PulseView with IR_NEC decoder by DjordjeMandic.<br/>
|
|
|
|
|
8 bit address NEC code
|
|
|
|
|

|
|
|
|
|
16 bit address NEC code
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
# Quick comparison of 4 Arduino IR receiving libraries
|
|
|
|
|
[Here](https://github.com/crankyoldgit/IRremoteESP8266) you find an **ESP8266/ESP32** version of IRremote with an **[impressive list of supported protocols](https://github.com/crankyoldgit/IRremoteESP8266/blob/master/SupportedProtocols.md)**.
|
|
|
|
|
|
|
|
|
|
## This is a short comparison and may not be complete or correct
|
|
|
|
|
**This is a short comparison and may not be complete or correct.**
|
|
|
|
|
|
|
|
|
|
I created this comparison matrix for [myself](https://github.com/ArminJo) in order to choose a small IR lib for my project and to have a quick overview, when to choose which library.<br/>
|
|
|
|
|
It is dated from **03.02.2021**. If you have complains about the data or request for extensions, please send a PM or open a discussion.
|
|
|
|
|
|
|
|
|
|
@ -481,6 +488,9 @@ It is dated from **03.02.2021**. If you have complains about the data or request
|
|
|
|
|
|
|
|
|
|
\* The Hash protocol gives you a hash as code, which may be sufficient to distinguish your keys on the remote, but may not work with some protocols like Mitsubishi
|
|
|
|
|
|
|
|
|
|
# Revision History
|
|
|
|
|
Please see [changelog.md](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/changelog.md).
|
|
|
|
|
|
|
|
|
|
# Contributing
|
|
|
|
|
If you want to contribute to this project:
|
|
|
|
|
- Report bugs and errors
|
|
|
|
|
@ -491,6 +501,30 @@ If you want to contribute to this project:
|
|
|
|
|
|
|
|
|
|
Check [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/Contributing.md) for some guidelines.
|
|
|
|
|
|
|
|
|
|
## Adding new protocols
|
|
|
|
|
To add a new protocol is quite straightforward. Best is too look at the existing protocols to find a similar one and modify it.<br/>
|
|
|
|
|
As a rule of thumb, it is easier to work with a description of the protocol rather than trying to entirely reverse-engineer the protocol.
|
|
|
|
|
Please include a link to the description in the header, if you found one.<br/>
|
|
|
|
|
The **durations** you receive are likely to be longer for marks and shorter for spaces than the protocol suggests,
|
|
|
|
|
but this depends on the receiver circuit in use. Most protocols use multiples of one time-unit for marks and spaces like e.g. [NEC](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_NEC.hpp#L62). It's easy to be off-by-one with the last bit, since the last space is not recorded by IRremote.
|
|
|
|
|
|
|
|
|
|
Try to make use of the template functions `decodePulseDistanceData()` and `sendPulseDistanceData()`.
|
|
|
|
|
If your protocol supports address and code fields, try to reflect this in your api like it is done in [`sendNEC(uint16_t aAddress, uint8_t aCommand, uint_fast8_t aNumberOfRepeats, bool aIsRepeat)`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_NEC.hpp#L96) and [`decodeNEC()`](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_NEC.hpp#L194).<br/>
|
|
|
|
|
|
|
|
|
|
### Integration
|
|
|
|
|
To integrate your protocol, you need to extend the two functions `decode()` and `getProtocolString()` in *IRreceice.hpp*,
|
|
|
|
|
add macros and function declarations for sending and receiving and extend the `enum decode_type_t` in *IRremote.h*.<br/>
|
|
|
|
|
And at least it would be wonderful if you can provide an example how to use the new protocol.
|
|
|
|
|
A detailed description can be found in the [ir_Template.hpp](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/src/ir_Template.hpp#L11) file.
|
|
|
|
|
|
|
|
|
|
### Creating API documentation
|
|
|
|
|
To generate the API documentation, Doxygen, as well as [Graphviz](http://www.graphviz.org/) should be installed.
|
|
|
|
|
(Note that on Windows, it is useful to specify the installer to add Graphviz to PATH or to do it manually.
|
|
|
|
|
With Doxygen and Graphviz installed, issue the command
|
|
|
|
|
`doxygen` from the command line in the main project directory, which will
|
|
|
|
|
generate the API documentation in HTML format.
|
|
|
|
|
The just generated `docs/index.html` can now be opened in a browser.
|
|
|
|
|
|
|
|
|
|
## Contributors
|
|
|
|
|
Check [here](https://github.com/Arduino-IRremote/Arduino-IRremote/blob/master/Contributors.md)
|
|
|
|
|
|
|
|
|
|
@ -499,6 +533,6 @@ Up to the version 2.7.0, the License is GPLv2.
|
|
|
|
|
From the version 2.8.0, the license is the MIT license.
|
|
|
|
|
|
|
|
|
|
## Copyright
|
|
|
|
|
Initially coded 2009 Ken Shirriff http://www.righto.com
|
|
|
|
|
Copyright (c) 2016 Rafi Khan
|
|
|
|
|
Copyright (c) 2020-2021 Armin Joachimsmeyer
|
|
|
|
|
Initially coded 2009 Ken Shirriff http://www.righto.com<br/>
|
|
|
|
|
Copyright (c) 2016-2017 Rafi Khan<br/>
|
|
|
|
|
Copyright (c) 2020-2022 [Armin Joachimsmeyer](https://github.com/ArminJo)
|
|
|
|
|
|